
工程师们来自普林斯顿大学开发了一代新的软体机器人,能够仅使用热量移动,无需电机或外部庞大的系统。
这一进展标志着软体机器人领域的一个里程碑,该领域在医学、危险环境探索和高精度任务中具有巨大潜力。
运动背后的技术
秘密在于一种液晶弹性体,这是一种分子结构可以编程以响应热量的聚合物。通过以控制的分子对齐打印材料,创建了作为柔性铰链的区域。当这些区域被加热时,它们以可预测的方式弯曲,使机器人根据任务折叠和展开。
在打印过程中,工程师们在机器人的机身中集成了柔性电路板,这消除了组装步骤并提高了可靠性。这些电路允许以极高的精度加热特定区域,并配备了温度传感器,提供实时反馈,纠正重复运动中的偏差。
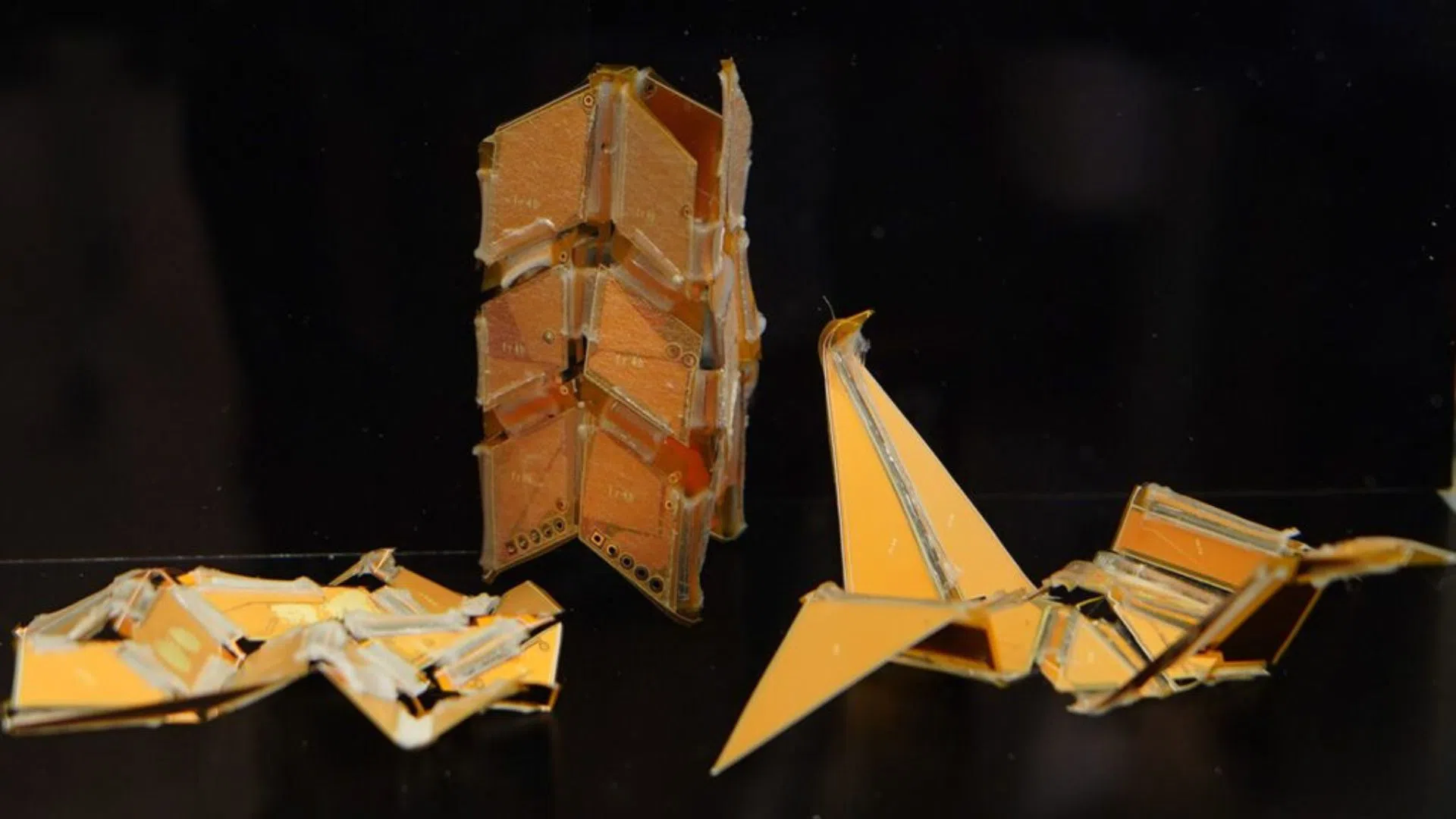
源于折纸的灵感
设计基于折纸的数学模型,与专家Glaucio Paulino合作。作为演示,团队构建了一个鹤形机器人,能够在施加电力时拍打翅膀并进行重复运动而无明显磨损。
材料与电子的整合
该计划起初是David Bershadsky的毕业论文,他寻找一种有效的方法来创建能够通过体积控制改变形状的机器人单元。与Davidson和Paulino教授一起,他还开发了一种软件工具,使其他研究人员能够设计类似的机器人,并与研究数据一起提供。
Bershadsky强调,最大的挑战是整合非常不同的技术:智能材料、柔性电子和热控制。克服这一困难使机器人能够作为一个连贯的单元运行,而不依赖于传统的机械组装。
潜在应用
这种方法为更加自主、轻便和多功能的软体机器人打开了大门,能够在以下领域操作:
- 微创手术,其中精确性和灵活性至关重要。
- 无法进入的环境探索,如污染区域或狭小空间。
- 自适应智能设备,能够根据任务改变形状。
通过热量和集成电子控制运动的能力可能允许软体机器人的可扩展制造,以在人体内部或极端环境中操作。
普林斯顿的进展代表了向不依赖传统电机的新一代软体机器人的迈进。其设计结合了材料创新、集成电子和热控制,为医学、工业和科学挑战提供了实用解决方案。这一发展为软体机器人在先进手术、远程探索和智能技术中成为主角的未来打开了大门。