
Les ingénieurs de l’Université de Princeton ont développé une nouvelle génération de robots souples capables de se déplacer en utilisant uniquement la chaleur, sans besoin de moteurs ni de systèmes externes volumineux.
Cette avancée marque un jalon dans la robotique douce, un domaine avec un grand potentiel pour des applications en médecine, exploration d’environnements dangereux et tâches de haute précision.
Technologie derrière le mouvement
Le secret réside dans un élastomère à cristaux liquides, un polymère dont la structure moléculaire peut être programmée pour réagir à la chaleur. En imprimant le matériau avec un alignement moléculaire contrôlé, des zones sont créées pour fonctionner comme des charnières flexibles. Lorsqu’elles sont chauffées, elles se plient de manière prévisible, permettant au robot de se plier et se déplier selon la tâche.
Lors de l’impression, les ingénieurs ont intégré des circuits imprimés flexibles dans le corps du robot, ce qui a éliminé des étapes d’assemblage et amélioré la fiabilité. Ces circuits permettent de chauffer des régions spécifiques avec une grande précision et sont équipés de capteurs de température qui fournissent un retour en temps réel, corrigeant les déviations lors de mouvements répétés.
Inspiration dans l’origami
Le design s’est basé sur des modèles mathématiques de l’origami, avec la collaboration de l’expert Glaucio Paulino. En guise de démonstration, l’équipe a construit un robot en forme de grue, capable de battre des ailes en appliquant de l’électricité et de réaliser des mouvements répétés sans usure visible.
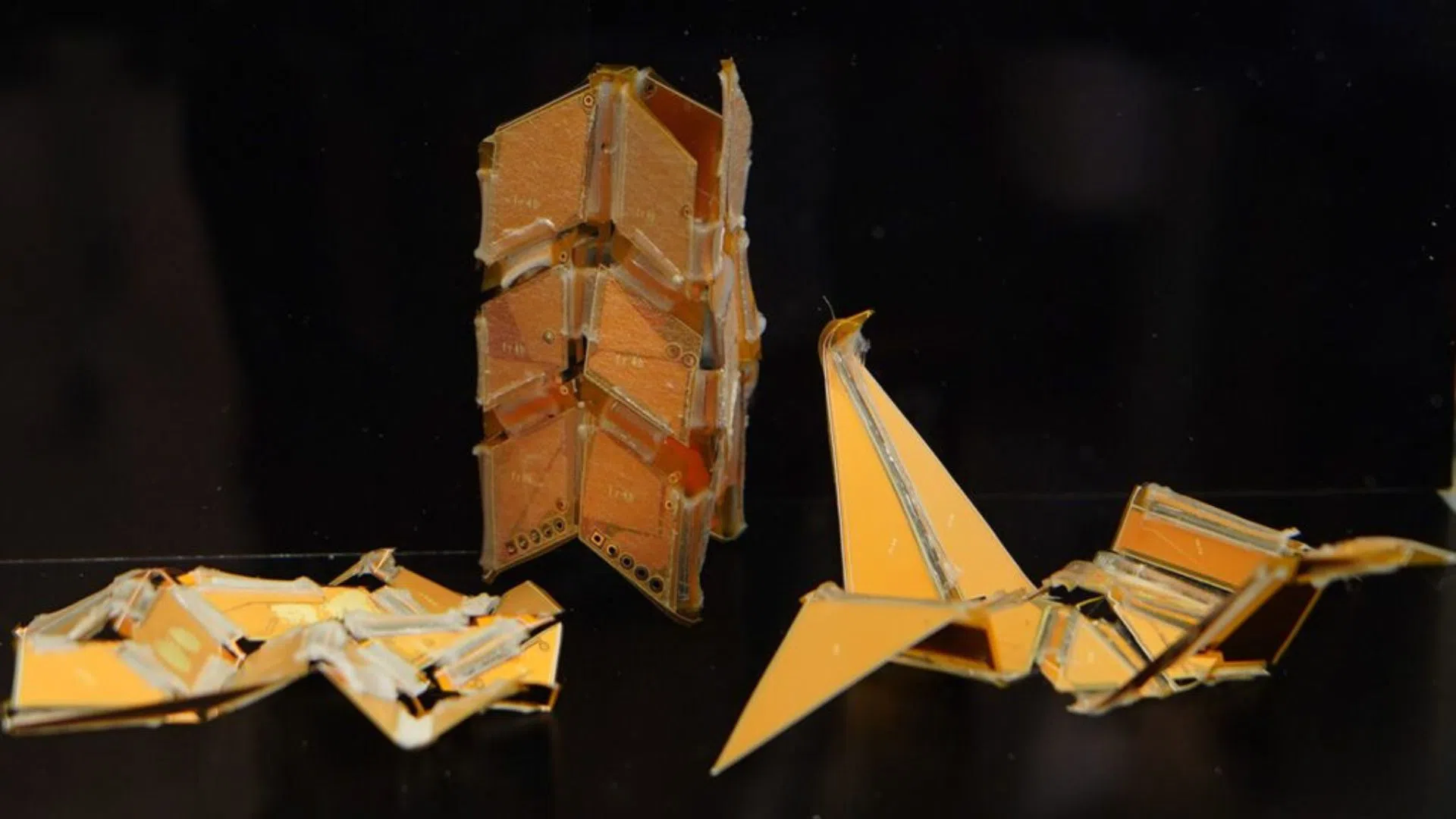
Intégration des matériaux et de l’électronique
L’initiative est née comme thèse de fin d’études de David Bershadsky, qui cherchait une manière efficace de créer des unités robotiques capables de changer de forme par le contrôle du volume. Avec les professeurs Davidson et Paulino, il a également développé un outil logiciel permettant à d’autres chercheurs de concevoir des robots similaires, disponible avec les données de l’étude.
Bershadsky a souligné que le plus grand défi était l’intégration de technologies très différentes : matériaux intelligents, électronique flexible et contrôle thermique. Surmonter cette difficulté a permis au robot de fonctionner comme une unité cohérente, sans dépendre des assemblages mécaniques traditionnels.
Applications potentielles
Cette approche ouvre la porte à des robots souples plus autonomes, légers et polyvalents, capables d’opérer dans :
- Chirurgies minimalement invasives, où la précision et la flexibilité sont essentielles.
- Exploration d’environnements inaccessibles, comme des zones contaminées ou des espaces réduits.
- Dispositifs intelligents adaptatifs, capables de modifier leur forme selon la tâche.
La capacité de contrôler le mouvement par la chaleur et l’électronique intégrée pourrait permettre la fabrication à grande échelle de robots souples pour opérer à l’intérieur du corps humain ou dans des environnements extrêmes.
L’avancée réalisée par Princeton représente un pas vers une nouvelle génération de robots souples qui ne dépendent pas de moteurs conventionnels. Leur conception combine innovation en matériaux, électronique intégrée et contrôle thermique, offrant des solutions pratiques pour des défis médicaux, industriels et scientifiques. Ce développement ouvre la porte à un futur où les robots souples seront protagonistes dans la chirurgie avancée, l’exploration à distance et la technologie intelligente.